| 1系统开发环境概述 3.1.1硬件环境 本导航软件系统所采用的硬件环境有GPs接收机和Pc计算机。 GPS定位接收机选用的是韩国Gstar串口模块GS一216GPS一体机G一MOUSE/RS232 串口GPS接收机。 GS一216MG一 MOuSEGPs接收器内置最新的低噪声、高灵敏度、低功耗MTK主芯 片,跟踪能力特别强,拥有32个通道,可同时快速追踪32颗卫星。内置GPS天线, 与业界其他产品相比,整体接收信号更灵敏、更便捷。可实现室内跟踪定位,攻破了业 内普遍存在的室内定位问题。 最值得一提的是,GS一216MG一 MOUSEGPS产品可支持USB、RS一232、PSZ、S端 子、航空接头等多种接口,能满足各种产品要求,因此使得其适用范围更加广泛,从一 般的汽车导航、汽车防盗、电子狗、tracking、保全系统、个人定位、各种调查到农业应 用等,并能在各种恶劣环境下满足定位需求。 G一 MouSEGPS接收器使用充电电池便可以持续保存时钟、内存信息,不必担心随 时缺电的问题。 该产品外盒采用进口ABS材料,外接纤维加强拉力高屏蔽线材,结实耐用。同时, 连接到笔记本电脑、车载电话或其他设备上即可升级为导航仪。下图为该GPS接收器 的实体照片。  该导航仪的输出协议如下: 数据标准—WGS一 84NMEA1083 支持数据格式—GGA,GSA,GSV,RMC 信号格式—波特率:9600,数据位:.8,校验位:无,停止位: 计算机配置为: 处理器— AMDAthlon64X2Dual第3章GPS导航电子地图的软件系统设计 内存—ZG 显示器—PHILIPS 3.1.2软件环境 本GPS车载导航软件系统所采用的软件环境主要包括操作系统,开发平台及开发 组件。具体如下: 32位 WindowsXP操作系统。 鉴于软件开发平台对数据处理速度、可拓展性、数据库等方面的影响,以及本人对 C++语言比较熟悉,所以采用 MierosoftVisualC++6.0开发平台。 本文采用Mapx控件来实现电子地图的基本功能,采用Mscomm控件来实现串口 通讯功能,建议采用较成熟稳定的版本。所以采用的为 MaphifoMapx5.02.26中文版和 MierosoftCommunieationsControl,version6.0。 3.2系统设计的总体规划 GPS车载导航电子地图系统是综合了多门前言学科的一种应用研究,涉及到GPS、 GIS、软件编程、串口通信等学科知识和技术,在领域上也是现代空间信息科技的一部 分。从理论知识到具体的实际应用的进行过程中,每一个步骤都要根据现有的情况进行 具体细致研究。本文在综合各方面知识的基础上,对GPS导航电子地图系统进行了实 际的研究和应用开发。下面先对整个系统进行总体框架设计。 3.2.1系统的总体框架 现代GPS导航系统所涉及到的部分主要包括:GPS卫星定位系统,导航计算机, 导航计算机的载体(一般为车辆),GPS接收机,导航定位软件系统以及导航系统的使 用者。 在整个导航系统的设计过程中,要明确各个组成部分要完成的功能,从而分别针对 各个部分进行设计,然后进行整合。GPS导航定位系统主要实现GPS信号的发送功能, 然后通过GPS接收机(一般直接在车辆上)接收信号,再通过导航计算机对信号进行 处理并实时显示在电子地图上,而电子地图系统则实现更丰富的诸如折线距离计算,图 层控制等功能。 系统的总体运行结构如下图所示: 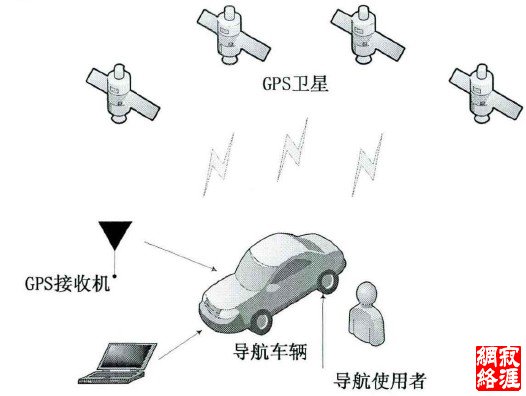 3.2.2系统的模块结构 本文中的GPS导航电子地图系统,主要包括以下几个模块:GPS模块,导航电子地图 基本功能模块,GPs数据与电子地图数据的匹配算法模块。将每个模块实现后,再将它 们组织起来形成一个逻辑整体,从而完成GPS导航电子地图系统的所有功能。各模块 的组织结构图如下: 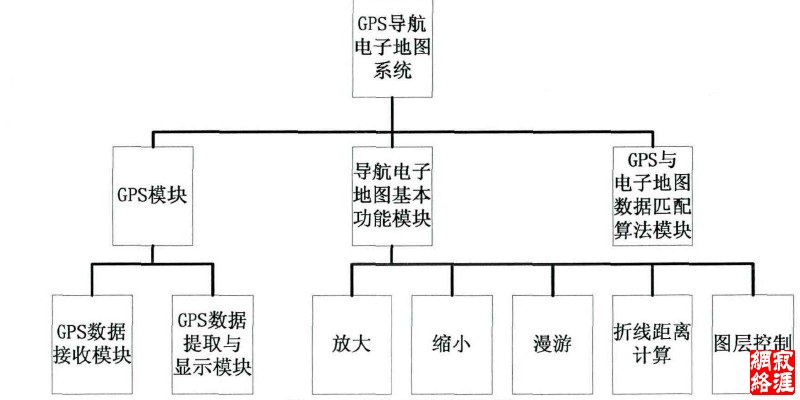 实现整体系统之前,要分别对各个模块进行具体的设计。具体分析清楚每个模块的 作用以及各模块之间的相互关系,下面对各个模块进行具体的说明。 GPS模块,该模块主要包括GPS数据的接收模块、GPS数据的提取与显示模块两 部分。在进行数据接收之前,首先要进行串口设置,并为GPS接收器接上+5v电源, |
