摘要:讲解和总结了我校电脑机器人应用中的程序设计。概迷了按照全国中小学电脑制作活动
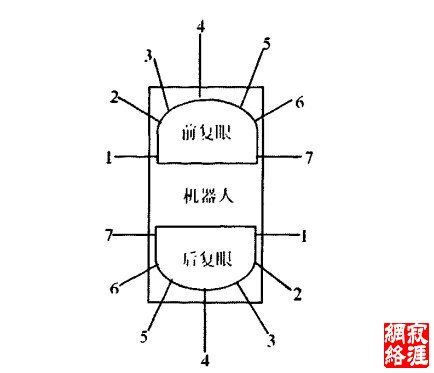
图3机器人前后复眼通道号分步圈
2)机器人后方有球 |

摘要:讲解和总结了我校电脑机器人应用中的程序设计。概迷了按照全国中小学电脑制作活动
图3机器人前后复眼通道号分步圈
2)机器人后方有球 |
随着网络技术的迅速发展,信息沟通也是信息化管理的一 部分....
过VBScript对PSD文档信息的读取方法,实现Photoshop作业的机器阅卷...
本篇文章我们主要讲述 hello world 程序的执行,这一次我们不从...
前段时间,我们实验室需要为外面某公司开发一个安全方面的软...
本文介绍的是在文件系统层上绕过冰刃的文件检测功能,而不是...
在写这篇文章之前我犹豫了很久,到底要不要把这些鲜为人知的...